Module 3
Stability and Control
Time Duration : 30 minutes
🎓Objective:
Continue the discussion from previous module regarding stability and explain it in detail in this module.
📖 Content :
Stability
Start with explaining what stability means in terms of Physics:
-
- Stable System:
When an object is in equilibrium and a small external force is applied on the object, then if the object comes back to its equilibrium position it is said to be a stable system.
- Stable System:
- Unstable System:
When an object is in equilibrium and a small external force is applied on the object, then if the object doesn’t come back to its equilibrium position it is said to be an unstable system.
- Neutrally Stable System :
An aircraft that has neutral stability tends to stay in its new attitude when it’s disturbed. For example, if you hit turbulence and your nose pitches up 5 degrees, and then immediately after that it stays at 5 degrees nose up, your airplane has neutral static stability. Pluto is a Neutrally stable system which is stabilized with the help of sensors, microcontroller and motors. So if you were to drop pluto without Arming, it would fall in the same orientation as it was left in, Assuming that we apply no torque on the drone while dropping it.
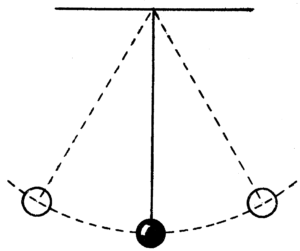
Consider this pendulum at rest(equilibrium). When it is swung to the right, for it to return back to the equilibrium,a restoring torque is provided. This restoring torque is provided by gravity itself. In the case of a pendulum, the C.G( centre of gravity) is situated in the centre of the bob and the axis of rotation is above it that is above the C.G. This particular arrangement is what makes the pendulum a stable system.
If you Invert the pendulum, the C.G is above the axis of rotation, and thus it becomes an unstable system.
Also it is interesting to note that gravity does not play a role in producing torque unlike a pendulum. Here we might want to explain how a pendulum is different than a drone…
Now give example of this stability in context of flying systems like Aeroplanes and Helicopters.
- An aircraft that has stability tends to return to its original attitude when it’s disturbed. Let’s say you’re flying an aircraft, you hit some turbulence, and the nose pitches up. Immediately after that happens, the nose lowers and returns to its original attitude. That’s an example of a stable system.
- A system that is unstable tends to continue moving away from its original attitude when it’s disturbed. For example, if you hit turbulence and your nose pitches up, and then immediately continues pitching up, your system is unstable. For most aircraft, this is a very undesirable thing.
👐 Activity
Convert Unstable system to stable system by using just a paper plane
Explain what is aerodynamic center and center of gravity
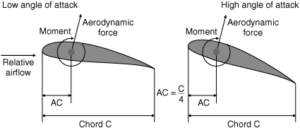
- Take a paper and throw it in the air, it will flip backward.
- Now fold the paper on front side and throw it, the flip will be delayed
- Repeat until paper flies. It suggest that the aerodynamic center and center of gravity have coincided
Control :
In order to take care of the the inherent neutral stability of the drone, its necessary to use sensors and control its behavior. Note that it is extremely difficult to fly a drone without sensors, but an aircraft can be. Thus, Control of drone is a very important aspect. Here is how it works:
Roll – Done by pushing the right joystick to the left or right. Literally rolls the quadcopter, which maneuvers the quadcopter left or right.
How does it work –
- For a quadcopter to roll, it needs a torque about the centre of gravity along lengthwise (Front – back) direction.
- To turn the quadcopter towards left as shown in following figure, We need a counterclockwise torque. That means the thrust on the right pair of rotors should be more than the thrust on the left pair of rotors.
- This is attained by increasing the speed of right pair of rotors to create more thrust on the right side as compared to the left side and the required torque is generated.
- Similarly increasing the speed of left pair of rotors creates more thrust on the left side as compared to the right side and quadcopter is turned to right using this torque.
- After generating the torque on either side along the longitudinal axis The force continues to act on the same pair of rotors which then translates to the acceleration which moves the quadcopter to left/right

Pitch – Done by pushing the right joystick up or down. Tilts the quadcopter, which maneuvers the quadcopter forwards or backwards.
How it works – For the quadcopter to move along any direction,in this case forward or backward, we need to generate torque.
So for the quad to do a Pitch movement it needs to generate torque at the centre of gravity along the Lateral axis(wing-wing)

- For the quadcopter to move forward there has to be torque produced at the backward pair of rotors which means those rotors are supposed to generate more force. So we make the motors at the back go fast than the ones at the forward.
The first figure shows how the forward pitch happens. - Similarly when the quad has to move or pitch backwards, we need to have torque generated at the forward side, which means we need to have the front pair of motors generate more force.
- The forward motors are made to rotate faster than the backside motors and this results in a backward movement or pitch.The second figure shows the backward movement.
- After generating the torque on either side along the longitudinal axis The force continues to act on the same pair of rotors which then translates to the acceleration which moves the quadcopter to left/right
Yaw – Done by pushing the left joystick to the left or to the right. Rotates the quadcopter left or right. Points the front of the copter different directions and helps with changing directions while flying.
How it works –
- Unlike roll and pitch, yaw is the effect of the rotors on the frame of quadcopter. (You will learn this effect in details in module 7)
- As shown in following diagram, When a propeller turns clockwise it generates counterclockwise torque on the frame to equalize the torques.
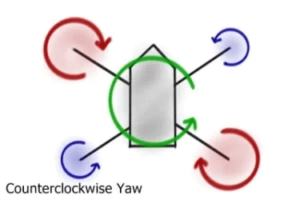
- Now diagonally opposite rotors generate torque in the same direction (Clockwise or Counter/Anticlockwise).
- If on of the pair of diagonally opposite rotors generate more torque than the other pair then the the frame will have a resultant torque acting in one of the direction ( Opposite of the propeller rotation) this helps the quadcopter to yaw.
Throttle – To increase, push the left joystick up. To decrease, pull the left stick down. This adjusts the altitude, or height, of the quadcopter.
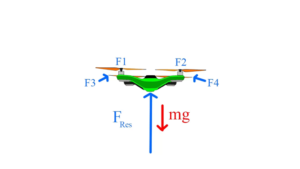
How it works: Throttle basically means giving the quadcopter thrust to go higher. How this happens in the drone is we increase the speed of all the rotors at the same time. So the the propellers produce a strong downward force that helps the drone go higher.


ravi123
Please mention about Control Algorithm (Mostly PID) used to Attitude and Altitude Stabilization Of drone..